BiasedBSM is part of the WaveTrain system class library
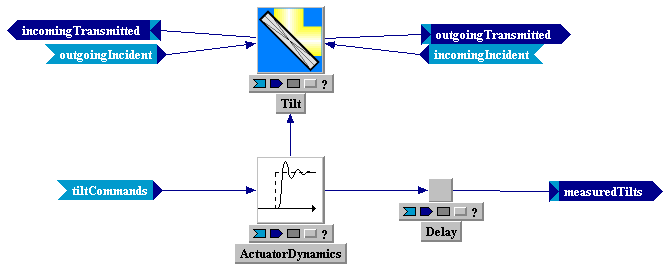
BiasedBSM models both the mechanical dynamics and the optical effects (applied tilts) of a beam steering mirror. The mirror is modeled as a two-axis critically damped harmonic oscillator. Tilt is given in radians of optical tilt, equal to twice the tilt of the mirror surface. Tilts applied to the reference wavefront, as opposed to putting them into the complex field. An idealized tilt sensor (actually just a delay) measures the optical tilts and makes them available as an output. As of WaveTrain v2007A, BiasedBSM is redundant to BeamSteeringMirror and should be replaced. It is provided for backwards compatibility.
|
|
Parameters
|
| timeLimit | double | Maximum amount of time that recallable outputs must be kept (if zero, then forever) (s) | 0.0 |
| timeConstant | float | controls the speed of bsm response; the bsm is modeled as a two-axis critically damped harmonic oscillator. | 1.e-6 |
| pos0 | Vector<float> | Initial position | Vector() |
| vel0 | Vector<float> | Initial velocity | Vector() |
| acc0 | Vector<float> | Initial acceleration (command) | Vector() |
|
Inputs
|
| incomingIncident | WaveTrain | describes all light incident from the "incoming" direction | WaveTrain() |
| outgoingIncident | WaveTrain | describes all light incident from the "outgoing" direction | WaveTrain() |
| tiltCommands | Vector<float> | tilt commands (radians) | Vector() |
|
Outputs
|
| incomingTransmitted | WaveTrain | describes all light transmitted in "incoming" direction | |
| outgoingTransmitted | WaveTrain | describes all light transmitted in "outgoing" direction | |
| measuredTilts | Vector<float> | measured tilts (radians) (from an ideal pickoff sensor) | |
|
Subsystems |
|
|
|
|
|
| tilt.outgoingIncident | <<= | outgoingIncident |
| actuatordynamics.actuatorCommands | <<= | tiltCommands |
| tilt.incomingIncident | <<= | incomingIncident |
| incomingTransmitted | <<= | tilt.incomingTransmitted |
| outgoingTransmitted | <<= | tilt.outgoingTransmitted |
| measuredTilts | <<= | delay.delayedVector |
| delay.recallableVector | <<= | actuatordynamics.actuatorPositions |
| tilt.tilt | <<= | actuatordynamics.actuatorPositions |
|
|
|
Last Saved: Tue Sep 03 21:54:05 MDT 2002 by TVE version 2007B
|


